空间描述与变换
坐标系与向量
本篇章均采用空间笛卡尔直角右手坐标系,所有坐标系都采用同样长度的度量单位。
定义:向量是具有大小和方向的量
本文默认你已经掌握关于坐标系中向量的内积(点乘,标量)、外积(叉乘,右手螺旋法则,向量)和基本的线性代数知识。
点和刚体的描述
点的位置描述:
在{A}中表示出{B}的位置:
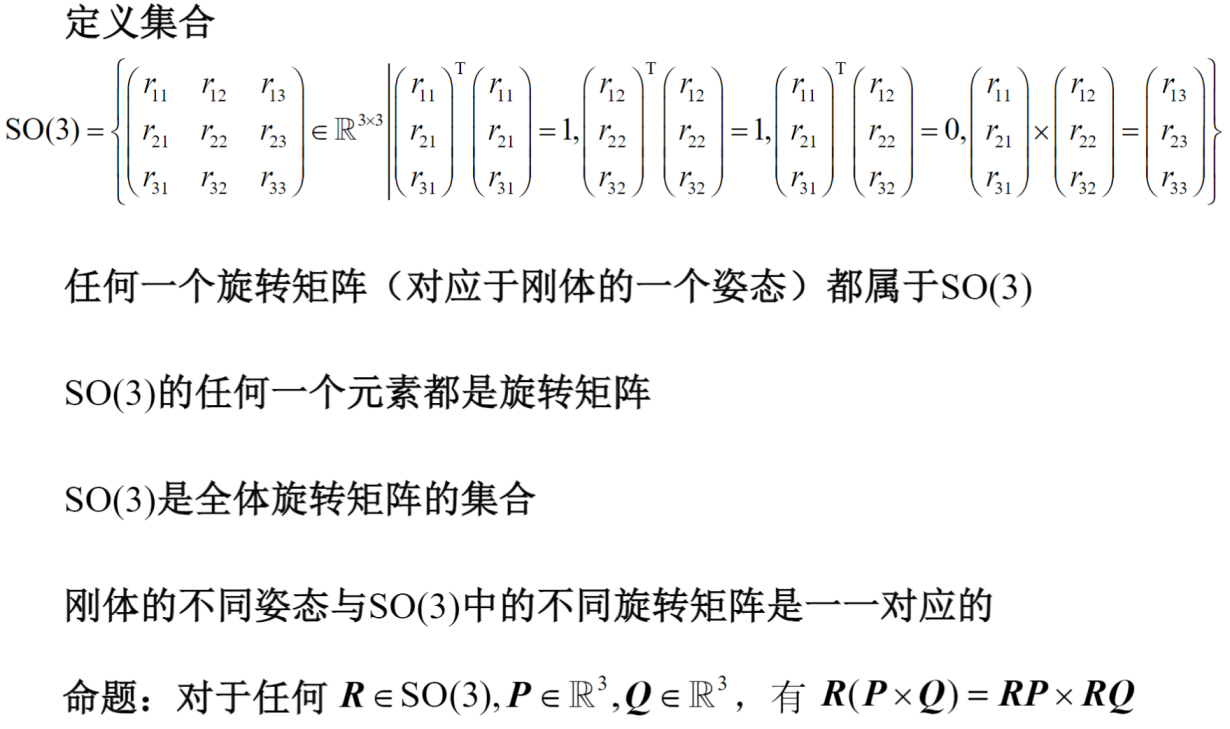
在{A}中表示出{B}的姿态:
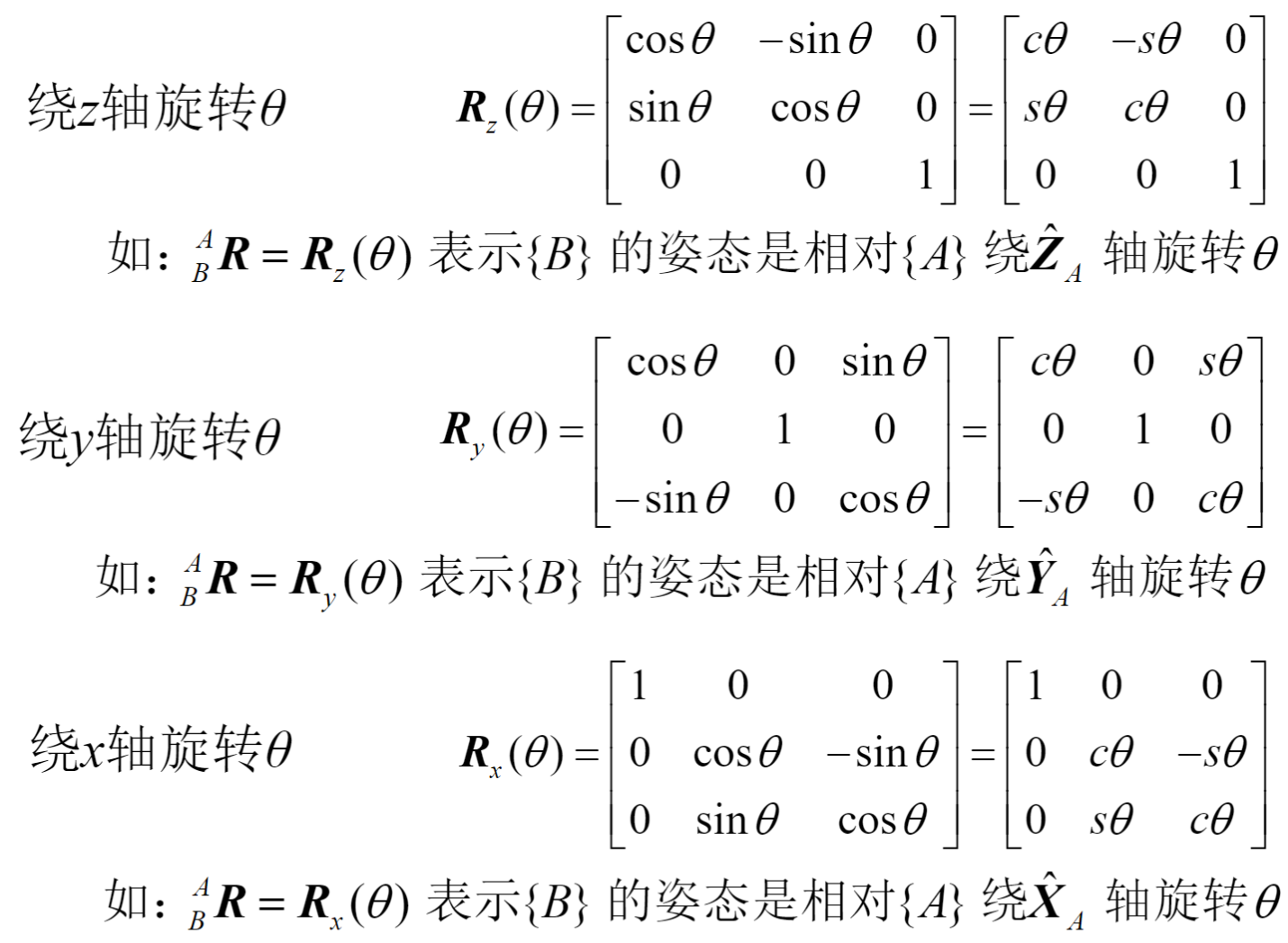
旋转矩阵:
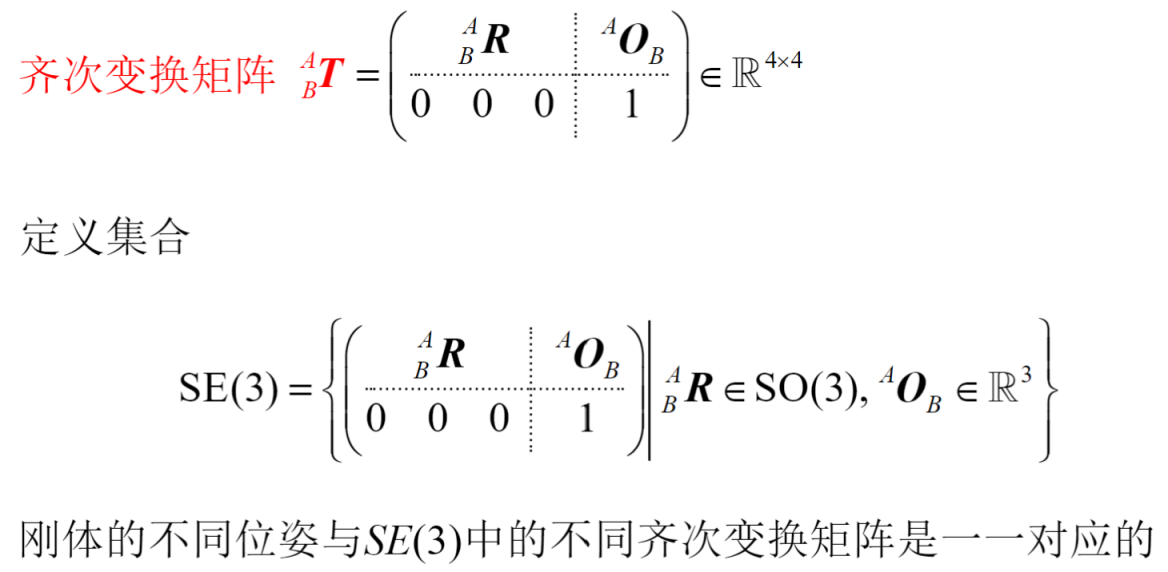
在{A}中表示出{B}的位姿:
两个坐标系的几何关系
同一个点在两个参考系中的描述:
链式法则:
姿态的欧拉角表示和固定角表示
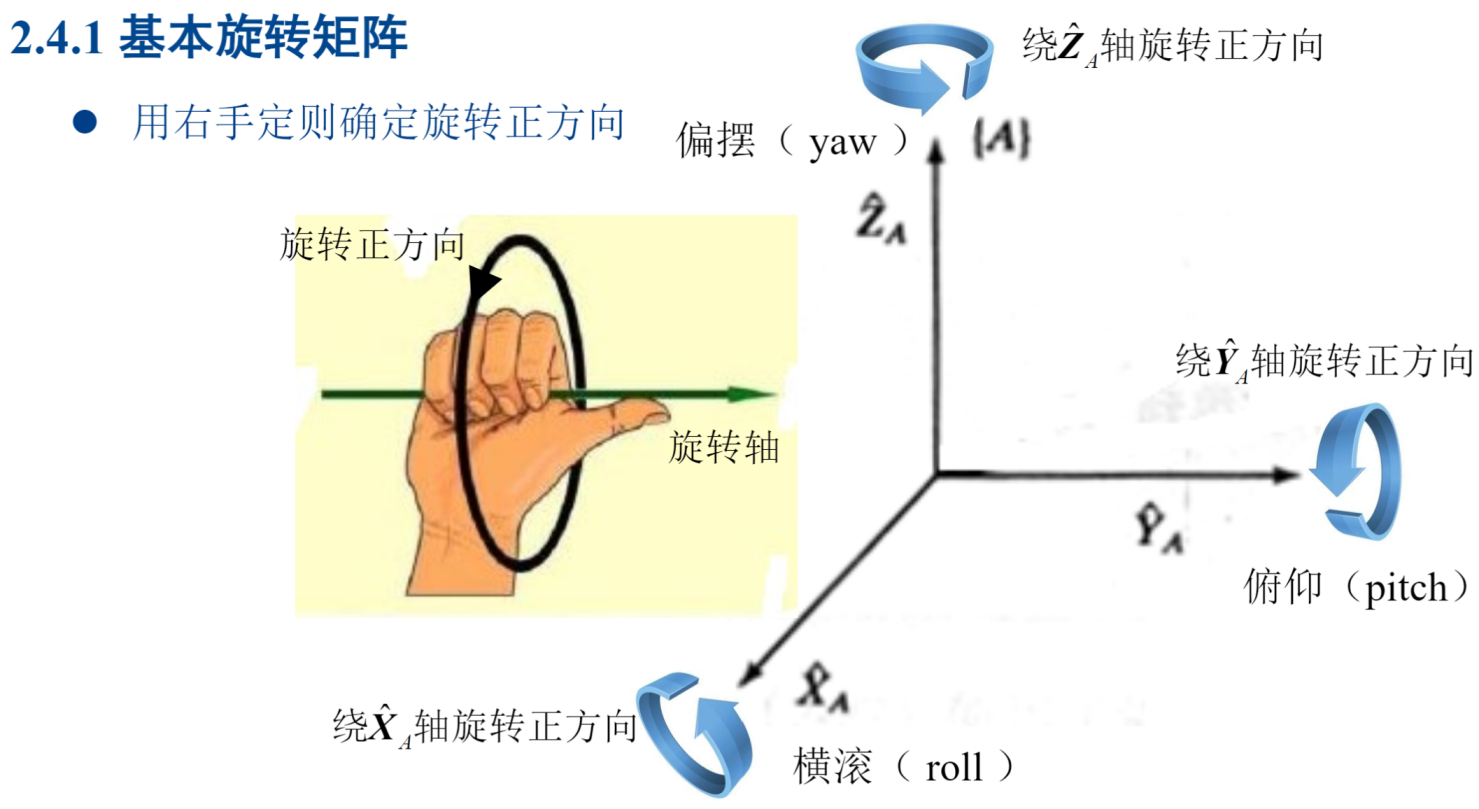
右手定则:朝向你时时逆时针
欧拉角表示
欧拉角操作是相对于联体坐标系的,每操作一步就右乘一项。
任何SO(3)都可以用欧拉角表示。同理,还存在x-y-z欧拉角、x-z-y欧拉角、y-z-x欧拉角、y-x-z欧拉角和z-x-y欧拉角上述6种欧拉角合称为非对称型欧拉角。
同理,还存在x-y-x欧拉角、x-z-x 欧拉角、y-x- y欧拉角、y-z-y欧拉角和z-x-z欧拉角上述6种欧拉角合称为对称型欧拉角。
固定角表示
固定角操作是相对于固定坐标系的,每操作一步就左乘一项。
同理,还存在z-y-x固定角、y-z-x固定角、z-x-y固定角、x-z-y固定角和y-x-z固定角、z-y-z固定角、x-y-x固定角、x-z-x固定角、y-x-y固定角、y-z-y固定角和z-x-z固定角。
两种表示的缺陷
一个姿态若能被一组俯仰角绝对值大于90°的z-y-x欧拉角或x-y-z固定角描述,那么也能被另一组俯仰角绝对值不大于90°的z-y-x欧拉角或x-y-z固定角描述。因此可以规定:
- 非对称型欧拉角和固定角可以规定β取值为[-π/2,π/2],当β取值-π/2或π/2时,结果不唯一,而在(-π/2,π/2)范围内取值唯一。
- 对称型欧拉角和固定角可以规定β取值为[0,π],当β取值0或π时,结果不唯一,而在(0,π)范围内取值唯一。
等效轴角表示
K代表转轴,单位向量,vθ=1-cosθ。这种描述称为等效轴较描述。规定θ取值为[0,π]。
当θ在(0,π)范围内取值唯一。
当θ为π时,K有两个解,如下。
当θ为0时,K可以任意取,无穷多个解。
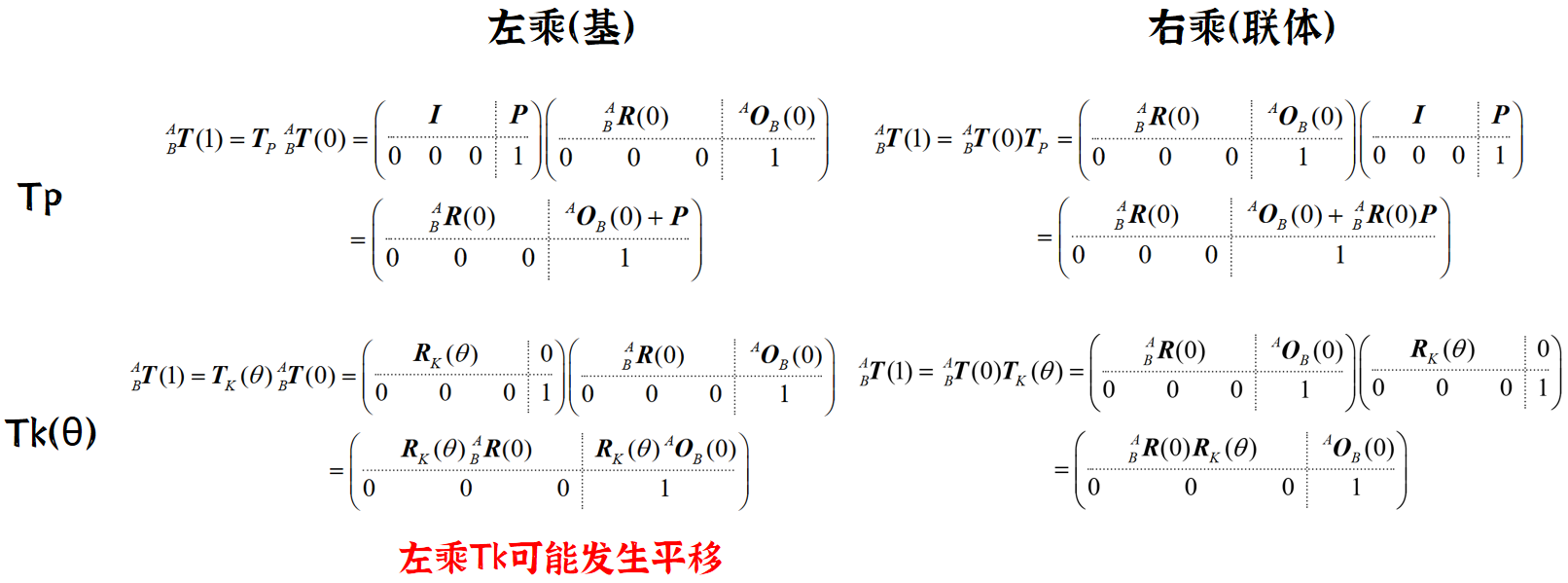
等效轴角表示旋转、平移变换
{B}绕AK旋转θ是左乘的:
{B}绕BK旋转θ是右乘的:
四元数
缘由:{B}在{A}中连续多圈翻滚或翻滚范围较大,不宜对旋转角作限制
对应的四元数为
它的共轭就是正号改成负号,其余都可以参考正常的复数运算法则。
单位四元数是模长为一的四元数,可以表示任何姿态 SO(3)。
直接解出来是这样的
三维向量转换为四元数的表示:
基于等效轴角表示的单位向量(kx ky kz)T和旋转 θ ∈ R,定义欧拉参数
右乘联体左乘基同样对四元数有效。