MATLAB 智能控制
啊,你就像者控制算法,我的心偏偏被你稳住了!
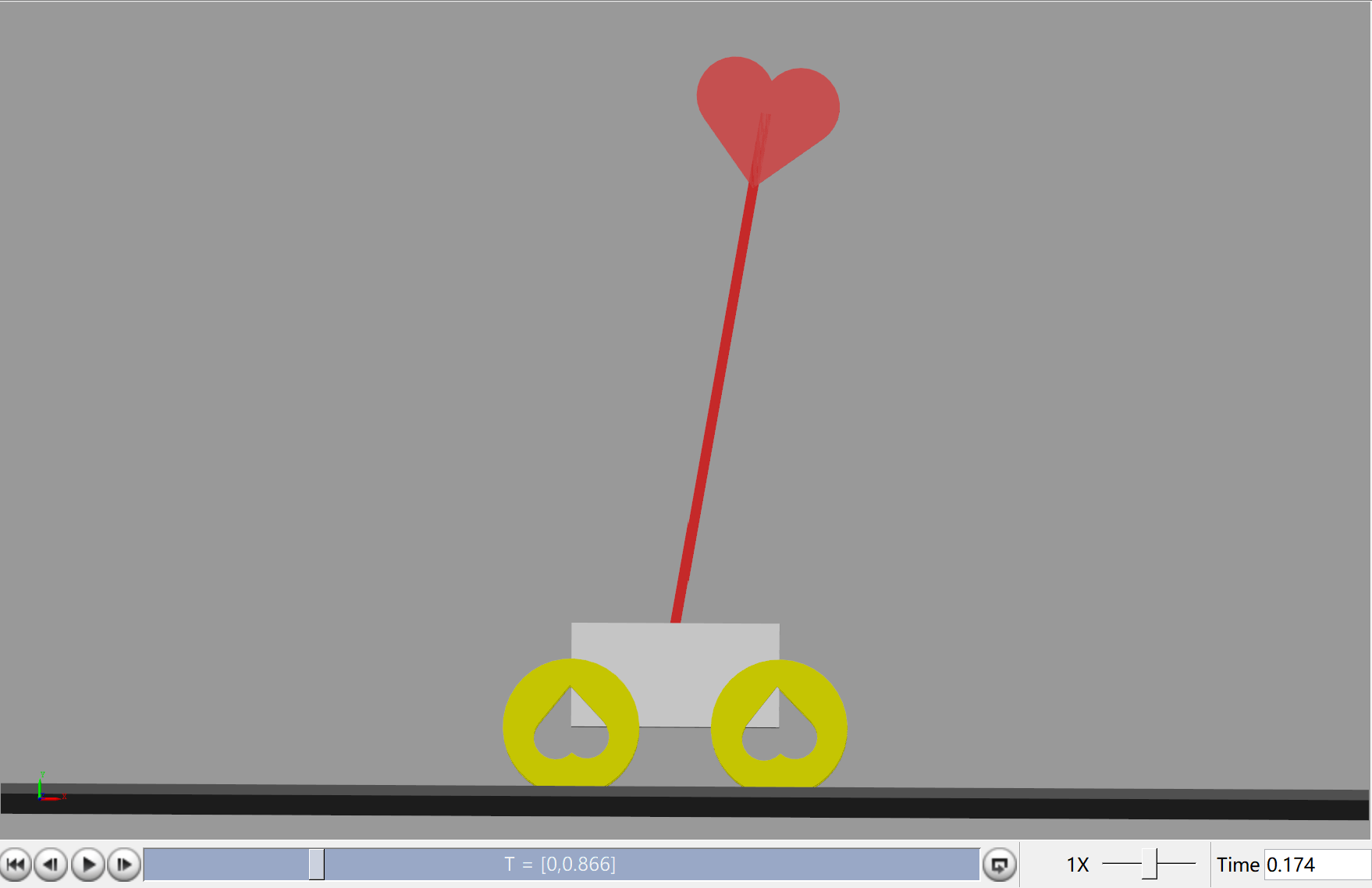
今天我们就要用 MATLAB 一步一步去做出这个爱心倒立摆。
倒立摆的 PID 控制模型
上个视频当中我们介绍了控制系统。我们回顾一下,一个完整的闭环控制系统,简单地拆分下,只需要一个被控对象和一个控制模块。
- 谁是被控对象?很显然呐,这个爱心倒立摆就是我们的被控对象。
- 被控量是什么?那不安的心摇摇欲坠的角度。
- 控制量是什么?我们给下面那辆小车的力。
第一步告诉我们要对这个倒立摆进行建模,有两种方法,第一种是用物理学、数学公式来“模拟”,在 MATLAB 当中我们可以编写 S-Function 来实现。另一种就是直接制作出这个模型,像开头发癫片段里面那样。(我们先讲这第二种,第一种放 P2 介绍)
MATLAB Multibody
想要搭建出这样一个模型,我们需要用到 MATLAB 当中 Simscape Multibody,建议结合官网文档学习。此部分的内容要感谢博主 J_H_Li 。
- 打开 Simulink 新建一个 slx 模型文件。
- 创建三件套:
Solver Configuration:模型求解器World Frame:世界坐标系Mechanism Configuration:配置整个装置的物理属性,点开设置 [0 9.8 0]
- 创建一个
6 DOF模块,允许你搭建的模型在这个“世界”当中能有三个平移、三个旋转的自由度,本质上是一个关节- 给 X 和 Y 方向上设置状态的位置(直接与该模块相连的物体在这个世界坐标系中的坐标)你可以定义一个变量
x_0也可以直接输入数字0.12。如果是采用变量,你可以新建一个脚本来赋值。 - x方向上给力,所以 Action -> Force provided by input
- 如果希望监控它的一些值,可以点开 Sensing 勾选你想了解的值。
- 给 X 和 Y 方向上设置状态的位置(直接与该模块相连的物体在这个世界坐标系中的坐标)你可以定义一个变量
- 接下来新建一个
Brick Solid作为“地板”- Geometry Dimensions 设置 [2 0.01 2]
- Export 勾选 Entire Geometry 选项用于和轮子接触,防止穿模
Ctrl + D可以查看模型。
- 再新建一个
Brick Solid- Geometry Dimensions 设置 [0.2 0.1 0.1](你们可以自行设置)
- Inertial 设置 Mass 1 kg
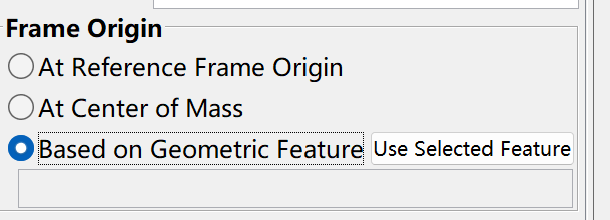
- Frames -> New Frame -> 选这一项↓再选一个长的面,点 use
- 新建一个
Revolute Joint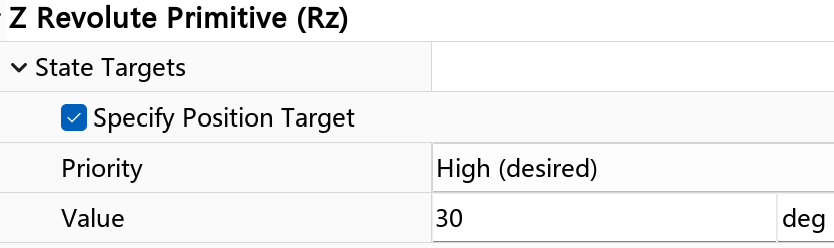
- 再新建一个
Brick Solid- Geometry Dimensions 设置 [0.01 0.5 0.01]
- Inertial 设置 Mass 0.5 kg
- Frames -> New Frame -> 同上,但是两个小的面需要各设置一个frame,分别用于与小车主体和爱心相连
- Graphics 里面可以设置颜色
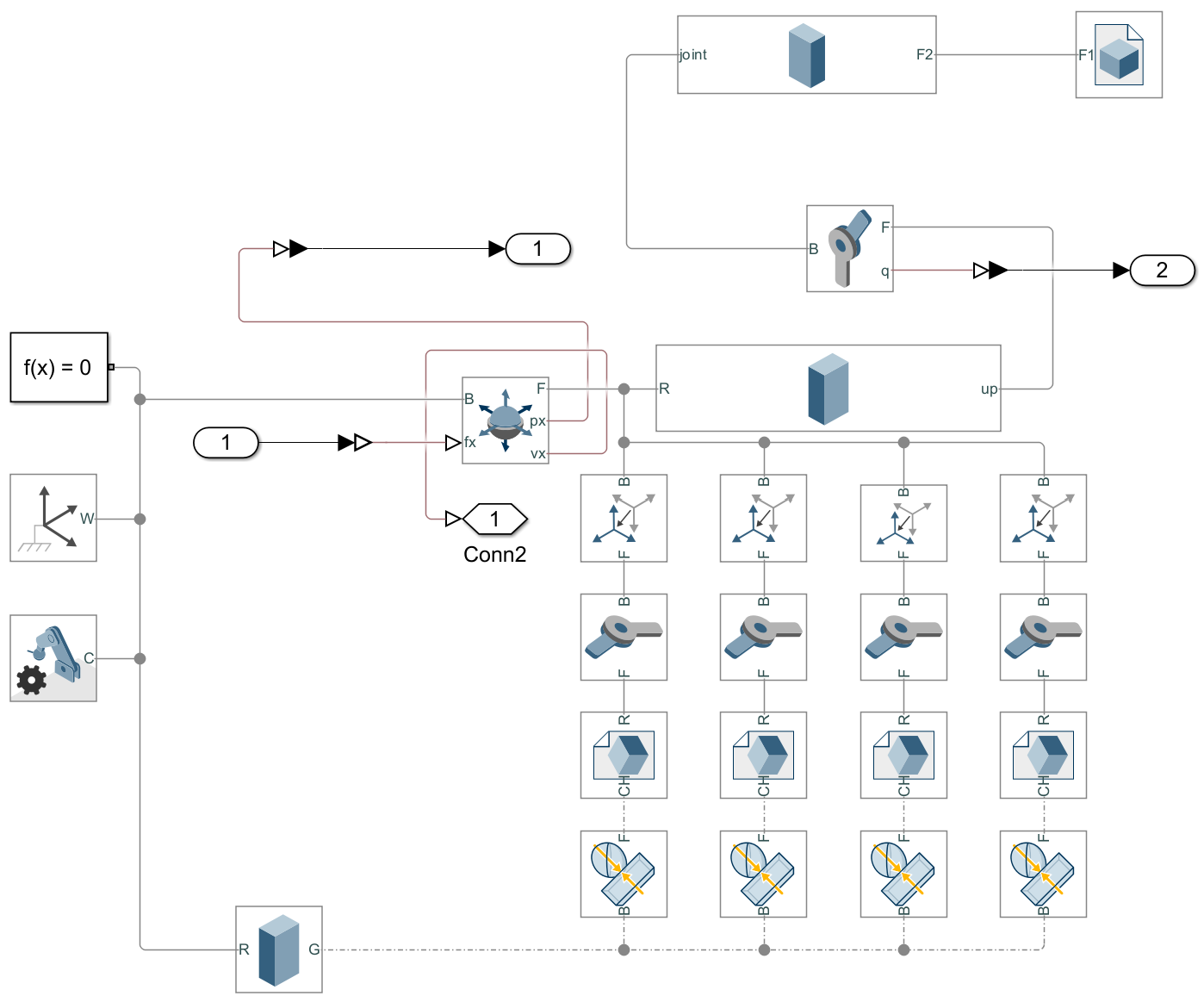
- 接下来就是车轮子的建模了,按照如下图所示,分别新建
Rigid Transform、Revolute Joint、File Solid和Spatial Contact ForceRigid Transform:设置的是四个轮子坐标的位置([0.1 -0.05 0.09],[0.1 -0.05 -0.04],[-0.1 -0.05 0.09]、[-0.1 -0.05 -0.04])Revolute Joint:设置的是四个轮子的关节File Solid:设置的是轮子的形状,这里我们导入 STL 文件(你可以通过 SolidWorks 建模导出成 STL 文件),设置 Geometry 中 Export 勾选 Convex Hull 选项,轮子就有实体了Spatial Contact Force:设置的是轮子与地面的接触力
- 第八步的
Spatial Contact Force与第四步Brick Solid连接,防穿模 - 新建
File Solid,用上自己制作的爱心,可以根据前面的自行设置。 - 根据自己需要新建输入和输出的模块
- 输入:
Input+Simulink-PS Converter - 输出:
Output+PS-Simulink Converter
- 输入:
最终连线可以得到如图的模型:
用 level-2 S-Function 建模
下面是一个倒立摆的 level-2 S-Function 建模,让我们快速看一下代码结构。
function inverted_pendulum(block) % Level-2 MATLAB file S-Function for inverted pendulum dynamics setup(block);end
function setup(block) % Register number of ports block.NumInputPorts = 1; % Input: Force (F) block.NumOutputPorts = 2; % Outputs: theta (angle) and x (cart position)
% Setup port dimensions block.SetPreCompInpPortInfoToDynamic; block.SetPreCompOutPortInfoToDynamic;
block.InputPort(1).Dimensions = 1; % 输入,即控制量 F block.OutputPort(1).Dimensions = 1; % 输出,即被控量 theta block.OutputPort(2).Dimensions = 1; % 输出,小车运动的距离 x
% 状态变量的数量(求解过程产生的量) block.NumContStates = 4; % [x, x_dot, theta, theta_dot]
% Set block sample time block.SampleTimes = [0 0]; % Continuous system
% Block characteristics block.SimStateCompliance = 'DefaultSimState';
% 定义函数 block.RegBlockMethod('InitializeConditions', @InitConditions); block.RegBlockMethod('Outputs', @Output); block.RegBlockMethod('Derivatives', @Derivatives); block.RegBlockMethod('SetInputPortSamplingMode', @SetInputPortSamplingMode);end
% 设置初始状态变量的值function InitConditions(block) % Initialize the state variables: [x; x_dot; theta; theta_dot] block.ContStates.Data = [0; 0; pi/6; 0];end
% 设置输出的量function Output(block) % Output the current state: theta and x state = block.ContStates.Data; block.OutputPort(1).Data = state(3); % theta block.OutputPort(2).Data = state(1); % xend
% 微分方程function Derivatives(block) % Parameters (adjust as needed) M = 1.0; % Mass of the cart m = 0.5; % Mass of the pendulum l = 0.5; % Length of the pendulum g = 9.81; % Gravity constant
% 定义状态变量 x = block.ContStates.Data(1); x_dot = block.ContStates.Data(2); theta = block.ContStates.Data(3); theta_dot = block.ContStates.Data(4);
% Input force F = block.InputPort(1).Data;
% 物理、数学公式 sin_theta = sin(theta); cos_theta = cos(theta);
theta_ddot = (F*cos_theta-(M+m)*g*sin_theta+m*l*theta_dot^2*sin_theta*cos_theta)/(m*l*cos_theta^2-(M+m)*l); x_ddot = (g*sin_theta - l*theta_ddot)/cos_theta;
% Derivatives of state variables block.Derivatives.Data = [x_dot; x_ddot; theta_dot; theta_ddot];end
function SetInputPortSamplingMode(block, idx, fd) block.InputPort(idx).SamplingMode = fd; block.OutputPort(1).SamplingMode = fd; block.OutputPort(2).SamplingMode = fd;end代码当中的公式可以采用拉普拉斯公式计算出来,暂不探讨。
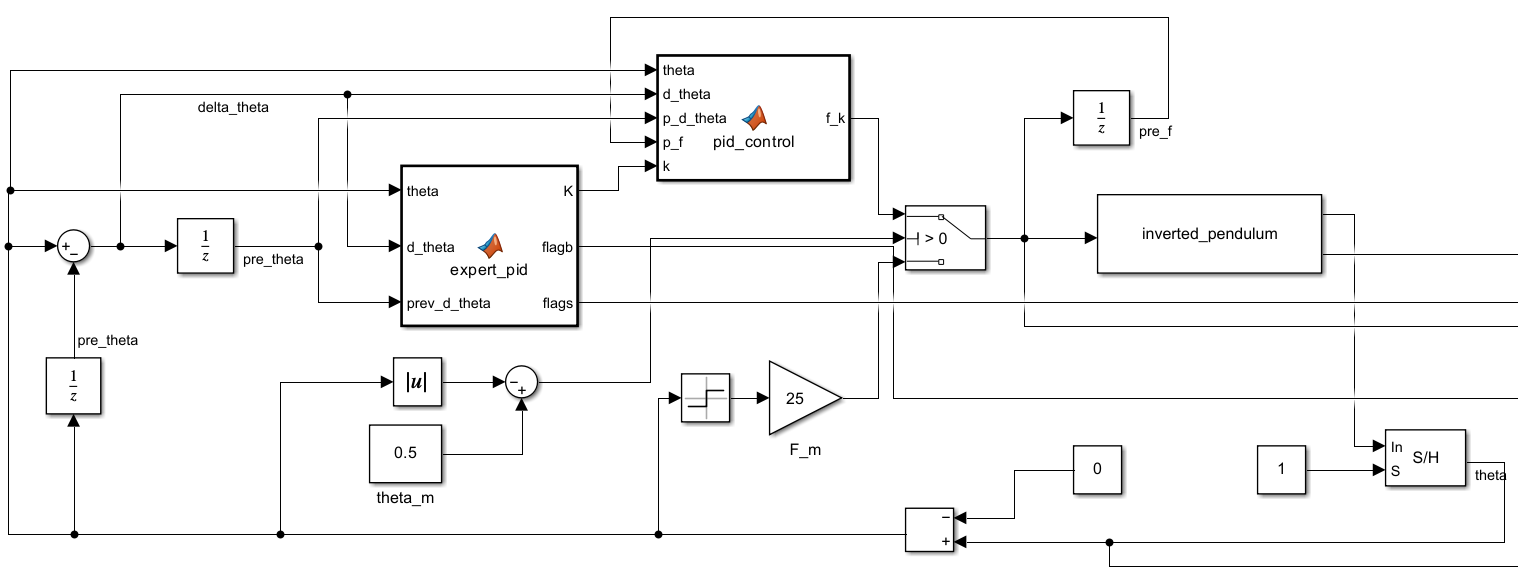
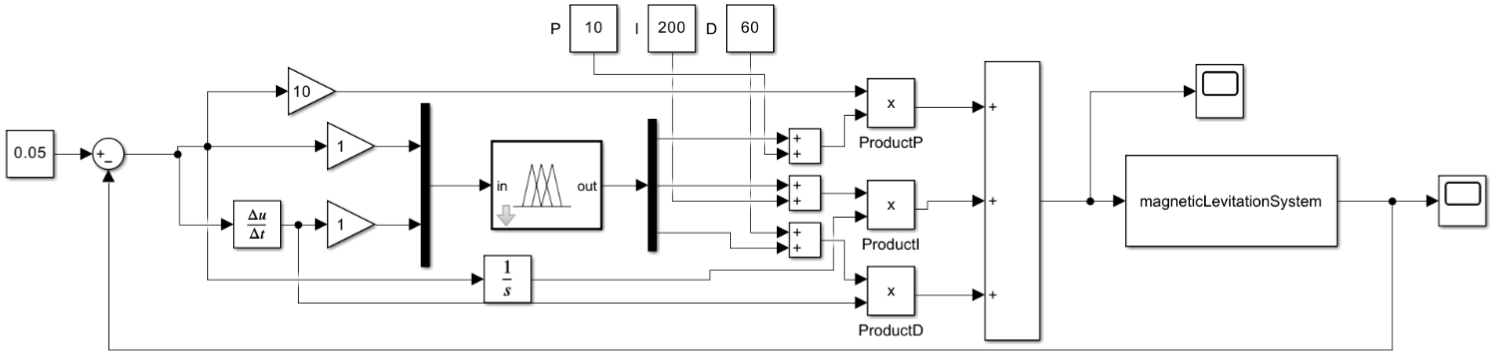
完成 PID 控制模型
接下来我们将要完成控制和反馈的部分了,上个视频当中我们已经列出 PID 的公式如下。
但是这次我们将采用增量型离散PID控制算法如下:
可以看到,只有一个角度的输出不够,我们还需要上一个时刻的角度输出来获得角度差d_theta和上上个时刻的角度来获得dd_theta。
因此,我们可以用Unit Delay模块来保存上一个时刻的值(本质是 Z 变换)。用两个该模块外加Sum模块,我们可以得出公式中所有需要的值。
这次我们将创建一个Matlab Function模块来实现 PID 控制,而不是用 Simulink 中的模块搭建。它就是一个实现 PID 控制的函数,如下所示:
function f_k = pid_control(theta, d_theta, p_d_theta, p_f, k) % PID Controller for inverted pendulum % Inputs: % theta - Current angle (rad) % d_theta - Current angular velocity (rad/s) % p_d_theta - Desired angle (target, rad) % p_f - Desired angular velocity (target, rad/s) % k - PID gain coefficients [K_p, K_i, K_d] % Output: % f_k - Control force (N)
% PID coefficients T = 0.0001; T_i = 0.001; T_d = 10; K_p = 200; % Proportional gain
% Compute PID control output f_k = p_f + k*(K_p * d_theta + T/T_i * theta + T_d/T * (d_theta-p_d_theta)); if f_k > 25 f_k = 25; elseif f_k < -25 f_k = -25; endend专家控制
如果你注意看刚刚的 PID 代码,其实在最后对输出的力进行了限制,不能超过 25N ,这也算是专家控制的一部分了。
接下来我们可以根据(题设)给出的要求去添加模块、连接完成整个专家控制系统。同样你可以采用模块来进行判断,也可以用 MATLAB function 来实现专家控制的分类讨论。
模糊控制
在命令行窗口输入
fuzzy弹出一个窗口,这个就是对模糊模块的配置。
上期视频中我们介绍了模糊控制包含模糊化、模糊推理和去模糊化三个步骤。
- 模糊化:点击黄色的Input,下面
Range设置输入的范围,上方Edit可以编辑需要划分的区间数量,点击每个隶属度函数可以设置它们的Type、Params调整它们的形状和范围。很多时候我们模糊控制的输入不只有一个,因此我们可以回到主页面点击Edit来新添一个输入,当然也可以在这里新添输出。 - 模糊推理:点击
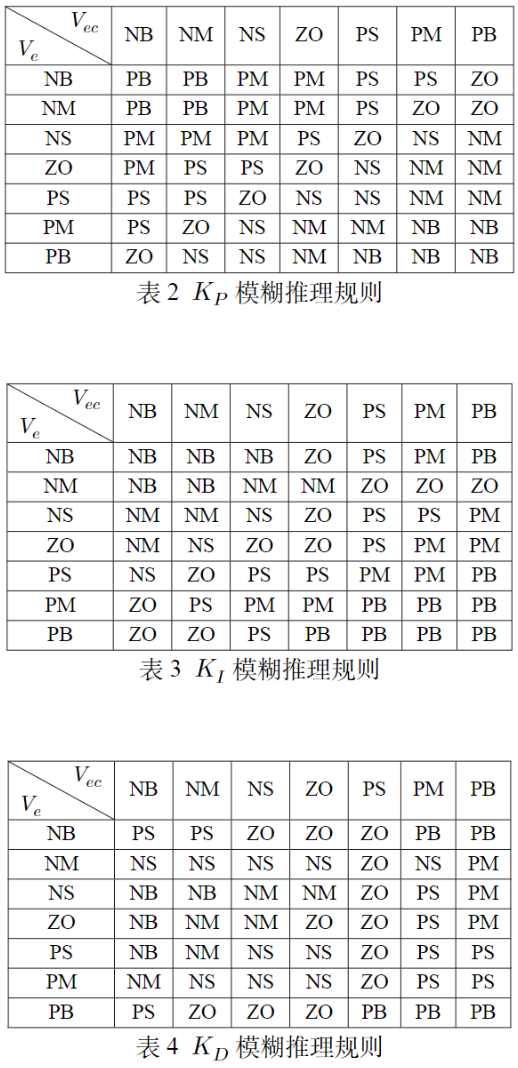
Edit->Rule就可以选择在什么输入条件下执行什么输出,再点击Add Rule添加一条规则。对于输入为误差和误差变化率一般使用如下规则: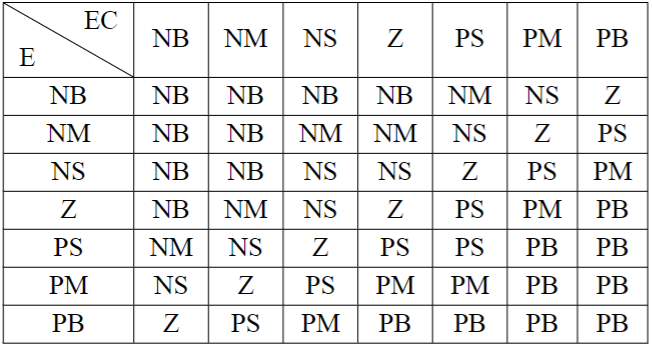
View->Surfaces中查看对应模糊规则对应关系的曲面。 - 去模糊化:点击黄色的Output,下面
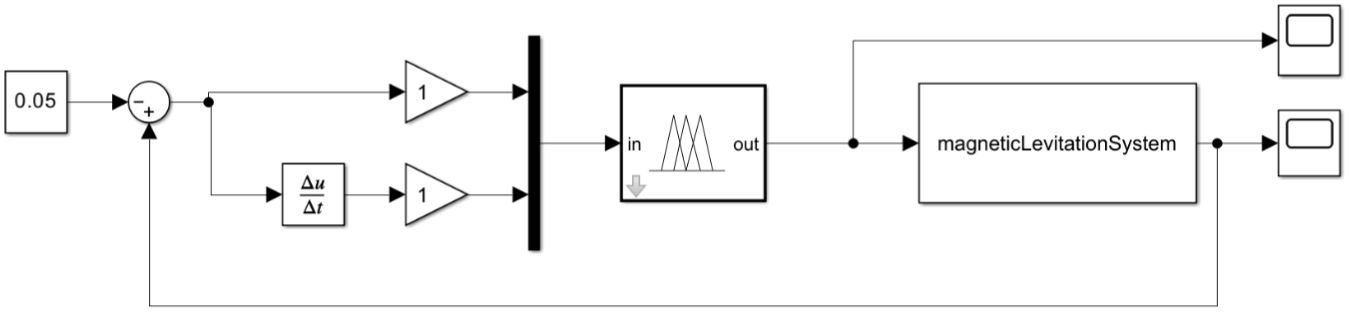
Range设置输出的范围,上方Edit可以编辑需要划分的区间数量,点击每个隶属度函数可以设置它们的Type、Params调整它们的形状和范围。 - 保存之后,在 Simulink 当中输入
Fuzzy Logic Controller,将刚刚保存的文件放入即可。
例子(具体代码后续上传到 Github):
- 直接模糊控制
- 模糊 PID 控制
神经网络控制
神经网络辨识
神经网络辨识的本质是学习和模拟某个系统的特性,并不是控制。选择的输入和具体模型(物理学公式)有关。这里我们已经有一个机械臂的 S-Function 模型,接下来我们将采用串并联神经网络辨识。
在我们的例子当中最高阶为二阶导,因此可以搭建出如下模型:
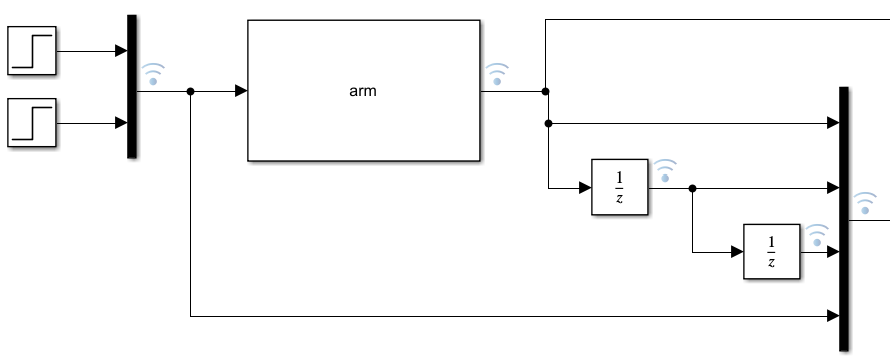
框选这个区域,点击记录信号,运行模型,再点击数据分析器。我们依据标签选择 mux 8个的输出,另存为 xlsx 文件。然后自行处理一下,分成两个表,一张表存输入量,一张表存输出(保证时间点一样)。
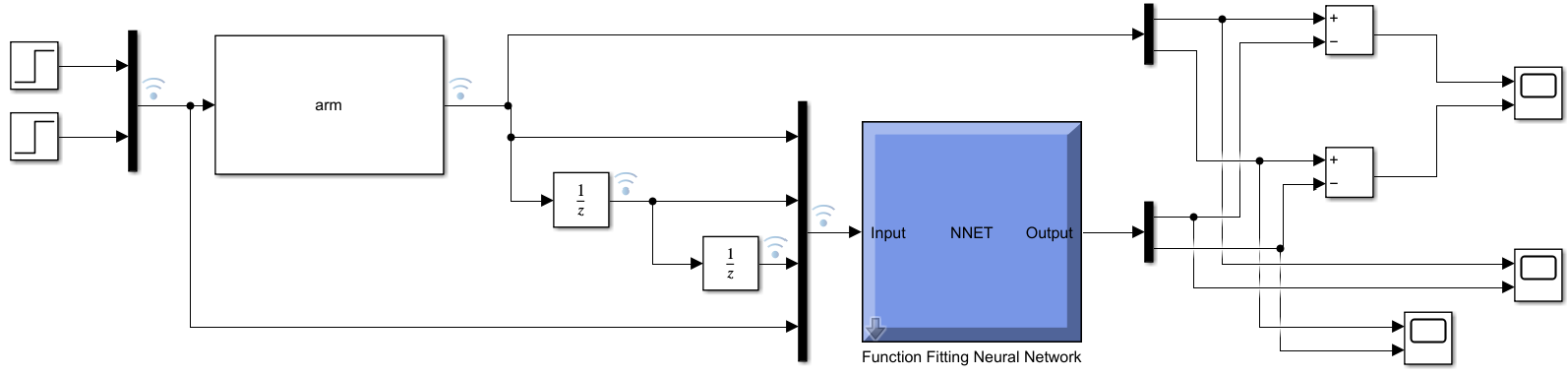
然后我们再命令窗口输入(也可以在APP当中找到神经网路拟合):
nftool导入两张表,都不用什么操作,下一步 -> 完成即可。
训练可以自行设置验证、测试数据多少,层大小,训练方式等等。最后导出模型,接入刚刚未完成的模型,可以接Scope对比。如图。
自适应神经网络
RBF 自适应神经网络需要把神经网络的代码写入到模块当中,为此你需要事先了解一些神经网络的知识,此处不展开,仅提供一些参考。